我想这些工业上的用词应该都是出自国外吧。
用英文讲:
机器===machine
机器人===robot
最早的robot应该是指人形,有一定自主决策能力的高级机器吧?
machine都在逐步的往智能化靠拢,所以machine和robot有很多交集,既可以叫机器,也有人叫机器人。
比如我在的行业,下边这些即有人习惯叫机器,也有人习惯叫机器人,但其实没有人形。
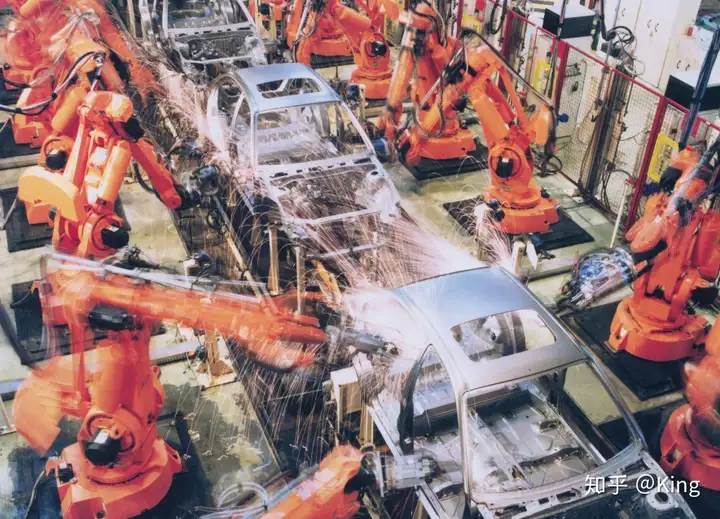
标准工业多轴机器人
多轴机器人通常也被叫做机械手,在工业领域有着几十年的应用,比如在汽车工厂里,多道工艺流程完全无人化,焊接喷涂等工艺流程都是由工业机械手完成的。
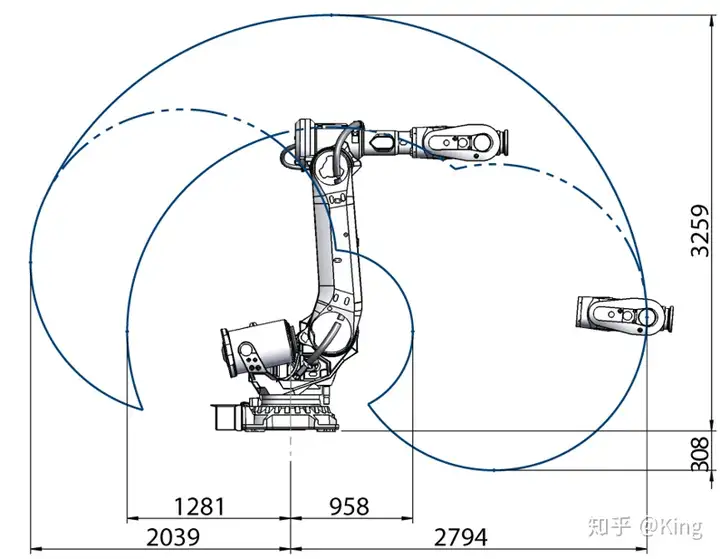
工业机器人在实际应用中由两部分组成,一部分是由ABB,KuKa,Fanuc等国际机器人巨头提供的机器人标准本体部分:

机器人本体可以在一定的半径范围内通过几个轴的动作配合能够到任意的位置
然后在标准机器人本体上加装上要实际操作的家具,也就是给机器人的胳膊上装上各种“手”,比如吸盘

或者焊枪

在仓储物流系统中常见的有如下的家具形式
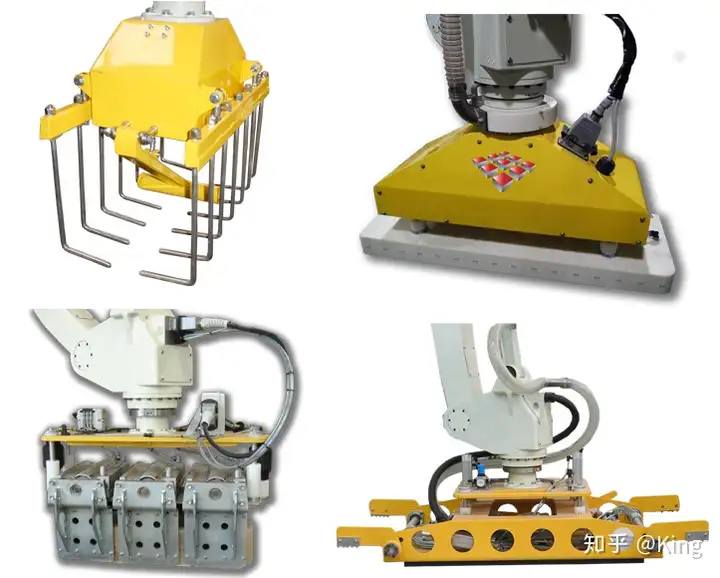
而多轴机器人的应用在仓储物流自动化系统里也有着非常广泛的应用,最常见的是装箱,即将零散的单间物品抓取到标准容器里,比如料箱或者纸箱里。通常用的是夹具是实盘和各种特制夹具。

如果被装箱的物品是标准的,同时又需要几块的
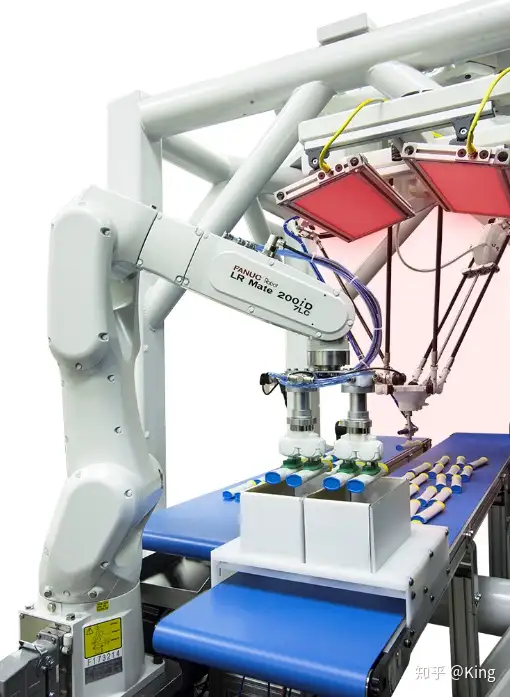
如果被装箱的物品是标准的,同时应用的场合里需要的效率较高,会采用如下的“蜘蛛手”机器人本体来将上游的小物品抓取到标准的盒子里。

在自动装箱的过程中,经常会遇到如下的情况:
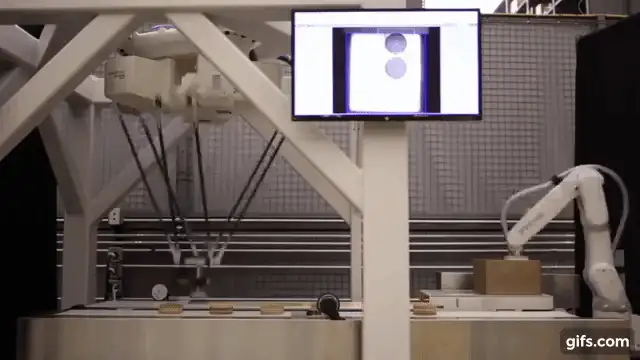
在装箱作业中要抓取的物品的种类比较多,比如在电商的配种中心里,有一个用户下了一个订单,需要1盒牛奶和1纸铅笔,牛奶和铅笔这两种物料的体积尺寸完全不一样,同时由于这些物料从上游来打机器人抓取工位时也是被随机置放在抓取工位上,那对于机器人来说这是一个挑战,因为机器人最擅长的是做重复性固定的工作,而此时要抓取的物料大小不一样,具体位置未知,传统的自动装箱过程就不在适用。
由此众多方案解决公司提出了视觉识别定位的方案,即对即将要被抓取的物品进行摄像头视觉扫描,经过一定的图像识别算法,判断他们的位置和大小后,将物品的坐标位置反馈给机械手进行抓取。

由上边的图例可以看出,对于复杂的案例下,除了机械手要知道物料的位置外,还需要知道要抓取的物品的位姿是如何的,因此这种情况下借助的图像是由3D摄像头捕摄到的。

在仓储物流中心或者厂内物流环节内,自动机器人拆码垛也是将会经常会用到的应用场景。比如把来的料箱整齐的码放到一个托盘上。

与上边讲述的自动装箱机器人类似,有些码垛要操作的物料单元可能是被随机摆放在一个工位上,同样的,标准机械手是无法直接抓取物料的,需要一个外接的识别系统告知机械手,要抓取的物料究竟在什么位置,这里也需要视觉识别技术。


一个完整的自动化系统往往不是由一个单独的设备完成的,通常是由多个子系统或者子设备被集成到一起完成的。对于仓储物流中心里机器人的自动工作也不例外,一个复杂的动作可以由多种形式组合来完成,笼统上被称之为协作。
近几年开发的双臂协作机器人就是其中一种应用自协作机器人,比如应用的案例有处理物料容器和抓取物料一并由一个机器人完成。

而在实际中更多的应用中,只有普通的六轴机器人要处理不同的工作,那可以采取自动换家具的方式。比如机器人要自己拿一个料箱,要自己抓取物品到料箱里,要自己将料箱码到托盘上,码号的托盘要被这个机械手摞到另外一个托盘上。这种工况下可以就可以采用一体机器人换家具的方式,家具可以被设计在一个复杂的多功能的家具上,也可以将家具单独设计放置在固定的家具待换工位上。

或者在需要效率较高的情况下,需要配置多台机器人负责不同的工作,互相配合完整一道完整的作业。

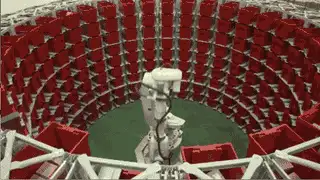
近几年有将机器人直接当做仓库搬运机器人来使用,即在机械手的周围放一圈货架,即可以当仓库存货,也可以当订单快速拣选。机器人可以直接操作到任何一个料箱上完成快速的进出库或者料箱订单拣选操作。

在仓储里的应用基本上可以归纳为机械手将各种物品从A点抓到B点。

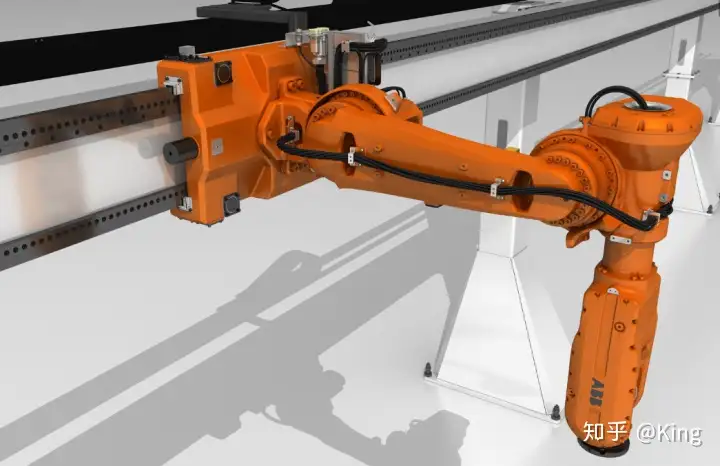
但是机器人的工作范围是受到本体的工作半径的 限制,无法在更大的范围内工作。如果机械手可以移动,那就大大的增加的机器人工作的范围和柔性。
而将机器人的底座放置到一个可移动的轨道上是个非常普遍的做法。

如果需要机械手移动的范围更加灵活,可以将机械手装在AGV上,AGV可以带着机械手自由的移动在一定的空间内,到达目的地后,机械手抓取需要的物料再配合AGV搬运到目的地。


以上的各种机器人都是基于标准多轴机器人本体配合夹具的方式完整物料的自动抓取的。还有一种在仓储物流自动化里用到的机器人叫直角坐标机器人或者龙门机器人或者桁架机器人。
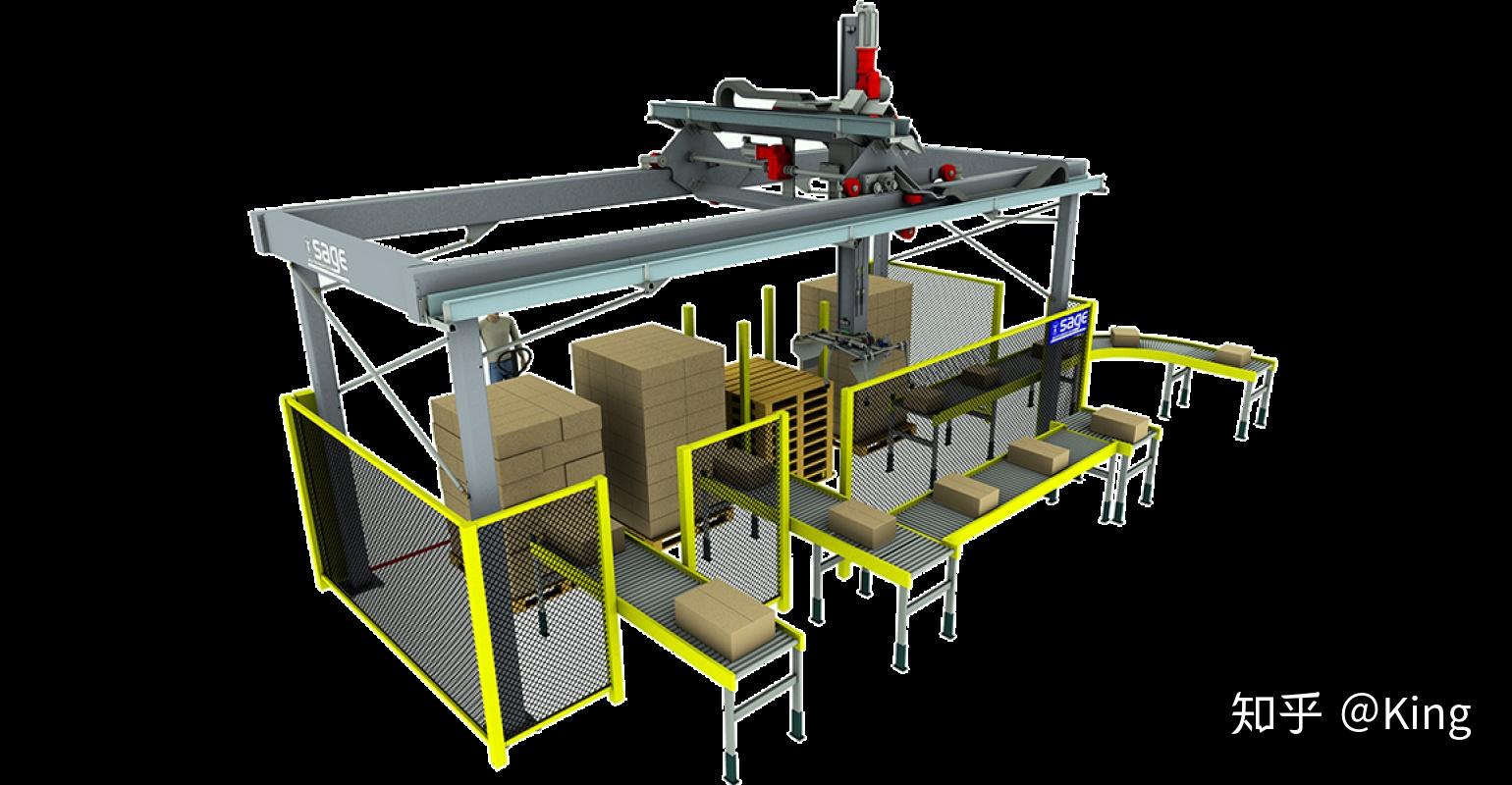
直角坐标机器人顾名思义就是机器人可以在X轴Y轴Z轴三个方向同时动作,在配合相应的家具完成物料的抓取。


搬运机器人,习惯被叫做AGV
叉车式AGV叉车式顾名思义就是将由人工驾驶的AGV通过配置一定的电控系统,传感器系统和软件使之成为无人驾驶的叉车在仓储物流中心内或者工厂内的工位之间进行物料搬运。

叉车时的AGV通常采用激光导航的方式,有的应用场合是完全用来物料的多点之间的搬运,包括与其他设备之间可以对接。

有些AGV除了承担搬运的任务外,也可以同时承担存储的功能,比如AGV将托盘根据系统的指令直接存放到货架单元里,这样的AGV通常有一定的高度提升功能。


或者AGV像人工叉车一样直接在仓库内进行落地堆垛码放。AGV的所有出入库指令与仓库管理软件WMS进行无缝连接。

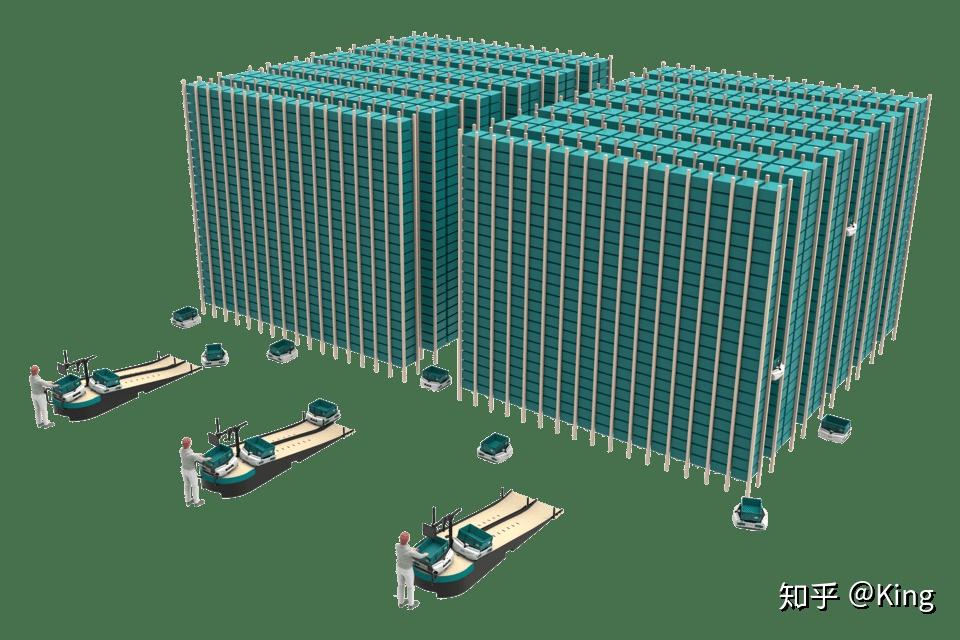
近几年来随着密集存储系统的广泛应用,也有AGV配合穿梭板组合而成的全自动密集存储系统,替代掉以前由人工开叉车将穿梭板在不同巷道内的切换转移。


叉车AGV在大型仓库内也可以用来做拣选跟随机器人,AGV跟随当前下发的订单指令跟随仓库拣选员运行到正确的货位处,拣选人工将拣选后的物品放置在跟随其左右的AGV上。

在汽车制造行业经常能看到背托式的AGV,物料单元被存放在AGV的车身正上方,在不同的工位之间来回搬运,到达一个工位后等物料被处理完或完成本道工艺加工后再继续搬运到下一个位置点。

有的背托式AGV可以在机身上配置辊道输送机完成与上下游物料单元的接驳

在电商里大火的Kiva机器人也是一种背托式的AGV,AGV托着移动货架在拣选工位和仓库内分配的储存位之间来回转运。


有些应用场景下,一次需要搬运的物料单元较多,而普通AGV通常一次只能带载一个物料单元,单位时间内的吞吐效率比较低,而采用牵引的方式,可以通过拉动小车的方式一次带载大量的物料一次性完成搬运,如下:



2017有个在网上特别火的视频,关于包裹拣选的机器人“小黄人”在一个钢平台上同时运行,每个小黄人搬运一个包裹,到系统指定的位置处,小黄人身上的翻板翻起来,将包裹落入位于钢板下边的一个袋子中,完成订单拣选。这个小黄人也是这几年在电商里应用非常广的一款AGV,适合单件包裹拣选,批量的AGV同时运行,单位时间内的吞吐量非常大。


相较于修建钢平台花费的时间和成本,一款新的拣选AGV也被推出市场,即在AGV上加载皮带输送机,包裹被AGV搬运到对应的拣选容器处,皮带带动包裹叠摞进相应的容器内。

通常的背托式的AGV是在平整的地面上进行物料的搬运的,如果AGV既可以在普通地面上行走,又可以直接爬升到货架里,那就典型的“水路两栖”AGV

在仓库内或者在工厂内工作过的人对地牛一定不会陌生,这是最简单经典的搬运设备,如果把地牛改造成AGV你会相信吗?


地牛式 的AGV非常小巧,适合在工厂内或者仓储物流中心里的货物搬运,如果说这是最精简的AGV,且慢,还有更简单的。


没错,地牛之间的物理连接没有了,两个货叉之间互相保持同步联动,使这款AGV更加精巧灵活。
带机械手AGV传统的工业机械手,由于自身结构的臂展的限制,工作范围受到了局限,如果机械手可以移动,其柔性和灵活性更加突出。目前有将机械手置于可移动的AGV机身上,互相配合,完成轻载物料的搬运和拾取。


每天在电商的订单中心里有大量的人工拣选的作业,需要拣选员根据订单行走于放置商品的货架之间,并将拣选后的料箱运回到发货区域。如果使拣选人员只专注于找到需要拣选的商品,不用搬运,那极大的降低了拣选员的劳动。跟随性AGV即可完成这样的功能。AGV跟着拣选人员并搬运拣选后的料箱,或者AGV根据订单指引拣选人员到正确的货位处进行商品捡取。


通常处理托盘的AGV针对的处理单元为固定的位置,固定的外形尺寸,如果不同的托盘之间位置不一样,并且托盘尺寸也有差别,那就需要AGV能对托盘进行动态的位置检测和外形检测。位置检测用来找到托盘的坐标位置,外形检测用来调整AGV本身的货叉间接。目前有在AGV本体上揉合视觉识别和激光扫描的算法检测来动态调整作业时的位置和叉距。

AGV在 运行过程中,要解决的第一步就是要能实时的找到当前自己的位置和要运行方向,即定位和导航技术。目前比较常见的为激光导引,磁道引和二维码导引。这些导引方式都需要事先在现场施工一些辅助导航的介质比如激光反光板,磁条,二维码等。如果导航过程中,无需再做现场施工,那系统的柔性有了提供并且施工周期也缩短了。参照与无人驾驶技术中的SLAM导航,仓储物流里的AGV也有SLAM导航的应用,也叫自然导航。


